|
Home Updates Hydros Cars Engines Contacts Links Racing Contact On The Wire |
A Journey Into Electricity

This is the first part of an occasional series charting the development of electric power as it relates to tethered cars and hydroplanes. It is important to note that most of the technology and theory passes way over our heads, so we look at it as interested bystanders and observers. Now firmly established in tethered hydroplanes it is not unreasonable to believe that it will become accepted in tethered cars as well. What we aim to do in this series is to have a look at developments up to the present time, try and understand the physics behind it all and some of the technology. Many of you will know or be aware of reigning European tethered hydroplane champion Antonio Della Zoppa yet there in the results for the final meeting at Basel was his name, running a Class V car. As he explained to us though, there was more to it than appeared at first as it was an electric car he was experimenting with. We are delighted therefore that he has agreed to share his experiment with us.
Electric power is far from new with an electric powered car recording over 100kph 120 years ago. Concession and exhibition model car tracks during the 20s and 30s, and later all slot car variants, used the same source of power. Apart from the obvious advantage of being clean and (relatively) quiet, simplicity was the key, yet it was not until the advent of modern, rechargeable cells that it really began to take off. NiCad packs, wire wound servo controlled rheostats and can motors became firmly established in RC boats, cars and planes with classes and competitions for these. It was the development of high power LiPo cells, electronic controllers and hi tech, brushless, motors that made electric power a realistic alternative to IC motors, even in speed events where ultimate power is required.
With these came a whole new language and avenue to pursue and develop. Progress was rapid, to such an extent that the fastest tethered hydroplane and tethered car in the world are currently electric powered, the Vector shown above being over 50mph faster than the much lauded VW IDR electric car. So, how does it happen? IC classes are determined by engine capacity and weight limit, with the limiting factor in each case being how much power can be extracted from the motor, which is pretty much finite. Electric power by comparison is governed by laws of physics and only constrained by available technology, so how can it be categorised? A little understanding of the physics helps here as we relate engine power to BHP or Watts, 746 of these equalling 1HP. Electric power in watts is calculated by multiplying current in amps by voltage, despite what current car ads and specs would have you believe. So a 12V battery producing 30amps equals just short of 1/2hp. And where the massive advantage is that increase either value and the available power goes up commensurately, until the physical limits of the technology in use are reached.
 |
 |
| NAVIGA A1 hydro Water cooled motor and esc | British SpE hydro, programmable controller to right |
Common sense and safety dictates that limits must be set, but how? NAVIGA initially experimented with four hydro classes, using the same weight limits as for IC but have now standardised on B1E airscrew class and A1E waterscrew, although with a maximum battery voltage of 42V, the maximum voltage of 10 LiPos. AMRCA has produced a set of rules that still use current weight limits for cars but has a maximum power limit for each, measure in watts, E1 40W, E2 41-60W, E3 61-80W, calculated from the cell capacity and the number of cells, but based on a nominal voltage of 3.7V. This is where it gets technical and we lose track as something called C comes into play, apparently the maximum discharge rate for a particular cell. C multiplied by the cell capacity gives the maximum current that can be drawn so three 3.7V 50C 5AH LiPos can discharge at 250 amps giving over 2,500watts or 3.7HP. Go up to 42V max and wow, 14HP, if our maths and understanding is correct? It is also a quirk of the motors being used now that the more work they are asked to, the more current they draw and the more power they produce. The IC motor does not stand a chance, mind you, neither does the technology at those currents, as the late Roger Phillips found to his cost when his record breaking Vector CF car incinerated itself, and therein lays another of the limiting factors in addition to the class weight limits. We suspect that electric power might appeal to many potential enthusiasts who are already aux fait with the technology if reliable and obtainable systems can be incorporated into tethered cars?
 |
 |
| Vector PIC control system | Vector battery packs and ESC |
Sadly, both the Phillips brothers died shortly after their incredible achievement in attaining 357kph with their car, which they had redesigned to come in under the Class V weight limit, so what the situation is with the Vector project and the plans to market components we do not know, neither do we have much of an idea of the technology used, other than that there were a lot of batteries involved and an innovative plate chassis to reduce weight. We also saw another carbon fibre, electric car at Basel in 2017, being run by the late Armin Schenk, which did not perform particularly well. In Sweden, Anders Martinelle has produced some incredible speeds, but by all accounts is also struggling to find speed controllers that will handle the extreme currents. Finally, it is important to understand that excessive current can be dangerous and LiPos must be treated with the utmost respect. We have already seen too many boats doing good impressions of bonfires and there is also significant personal danger associated with these cells that must not be ignored.
If that has not confused you totally, here is Antonio, describing work so far on a very experimental electric car that would meet FEMA Class V weight limits. We would be delighted to add any further information from those with electric car and boat experience, especially if they can explain the mathematics involved and give some direction as to suitable hardware.
Antonio Della Zoppa builds an electric tethered car
|
At the moment I’m modifying the car. You will get a comprehensive description on the new layout later on. However, it takes time as I can’t disassemble the gear box myself and have to send it back to Otto Stroebel. By the way, this is an old 10cc car, which Otto used some time ago and it was his great idea to electrify it. The car used in Witterswil, Switzerland, was too heavy at 3200grams (class limit 3130gm) and the weight distribution very bad indeed. I consider that the Lipo was unnecessarily big and heavy. I had been using a
40mhz RC unit and a badly set speedcontroler giving
quite some radio problems, which prevented the car
on running up to top speed and decelerating |
|
|
|
After the run the outer rear wheel had been diminished from 93 to 89mm – just to show how incorrect centre of gravity and weight distribution worked on the tyre. Also I forgot to mount a spark suppression device, which is an absolute must with more than 4 cells. It was the first time out on a track and as ever it taught me a great deal on setting up the car and also starting it… no mean thing. I have now plenty of time to rectify all the little errors during wintertime in order to see a much more competitive car next year! Left: Widening the pan for the speed controller |
|
Some tech. details: Lipo: 5S, 5200m/A, 710gr. Motor : Inrunner
Brushless Tenshock Speedcontroler :
Hobbywing 150A, Gearbox : 1:1,61 Witterswil 03.10.2020 : Base Speed 222.366km/h, Best Lap : 257,208 km/h
|
|
|
|
Antonio Della Zoppa
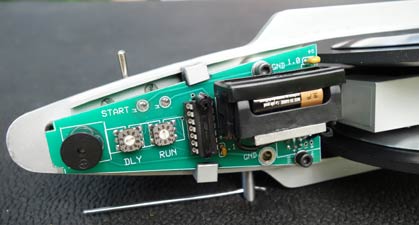
Shortly after this article was published we received some very helpful thoughts from Allan Barnes and helpful advice. Something he did suggest was that RC control should be allowed in WMCR as it is in FEMA. As he pointed out, putting the components together for the power train and speed control is (relatively) easy, but producing a programmable, electronic controller to operate it all is way beyond most and would potentially deter those that could well be interested in this route. Another piece of advice that we can associate ourselves with having seen more than one burning hydro is to keep current well below the ratings of ESCs and battery packs. No doubt there is a desire to extract maximum performance but that tends to lead to very short component life.
A
ntonio Della Zoppa 2021 car developmentH
aving worked on the 2020 electric tethered C5 car during spring time 2021, saw me back in the office for a few pics and comments. After a long winter season and hours of cross country skiing – now back to the work shop with a clear mind and new ideas.|
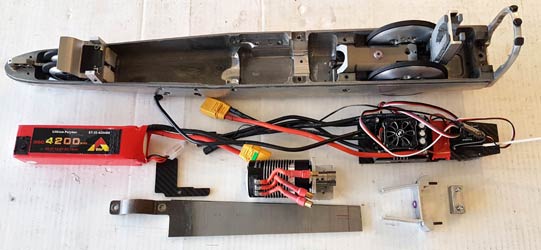
The modest attempt at modifying a Class 5 car (10ccm) into electric power back in 2020 and racing it on the Witterswil track/Switzerland, demanded for a more secure and better performing outfit. Electrified Class 5 car. The Lipo battery is now deep in the pan in order to get better weight distribution. Unnecessary mounting lugs were milled out. The electronics are mounted on a carbon tray at the rear. Two U type guides prevent wires to be damaged by rear wheels. |
|
The modified car weighs now 2600 to 2900 gr depending on battery packs. It’s much lighter than the previous version weighing in at 3200gr.The Lipo pack is now in the correct place and balances the car correctly. As can be seen the electric motor is now placed directly in front of the gear box. The main goals were much better weight distribution in order to get correct horizontal and vertical balance. The battery had to be relocated deep into the pan and the motor much nearer to the gear box. The electronics are now sitting on a pan at the rear of back axle. The photos show the work done so far.
|
Right: Complete car shown on the roller stand for stationary "on road testing". For safety reason I recommend not to run the car "off load" as the very high RPM will explode the tyres! I feel today that a future electric tether car should be designed, integrating all necessary components as electric motor, Lipo pack, speedcontroler, RC unit. Starting from a Class 5 car is surely not an ideal basis. However it was the least complicated way for me to get into tether car racing. Otto Ströbel and Gilbert Huguenin had been precious help to instruct me on modern Class 5 cars. |
|
As for travelling to race sites it is important to know that many airlines will not allow carrying highly dangerous Lipo packs in their carrier. It may be a true problem.
|
|
Test run, from left to right. Wattmeter/Power analyser capable to absorb up to 200A. Indicates: Peakcurrent A / Voltage / Power consumption and peak value / Energy throughput Lipo Battery 4C / 4200mA, to prevent sparking while connecting the battery wires I use XT 90 antispark connector plugs. Inrunner brushless motor, Xerun, sensored, 4-pole with adjustable timing / 2-6 Lipos, Dia. 40mm Xerun speedcontroler with built in cooling fan, for sensored motors, 2-6 Lipos / 150A peak / BEC |
 |
 |
|
Heat box to get Lipos
up to race temperature, |
These are the ingredients for the next test at the Witterwil track. |
Text and photos by Antonio Della Zoppa
©copyrightOTW2021